Syllabus Map
- Study map: Syllabus Study Map
Overview
- The R-CNN family introduced region-based object detection using explicit proposals.
- Each step improved compute reuse and training simplicity.
- The main evolution is: R-CNN → Fast R-CNN → Faster R-CNN.
R-CNN
Core idea
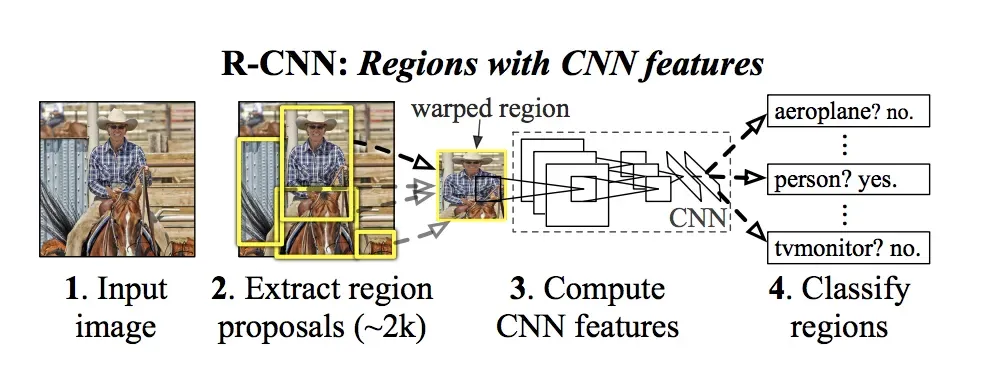
- Generate region proposals, then run a CNN on each proposal.
- Classify each region and refine its box.
Pipeline
- Selective Search proposes ~2k regions per image.
- Warp + CNN: each proposal is warped to a fixed size (e.g., 227x227) and fed through a backbone like AlexNet or VGG.
- SVMs: one-vs-rest linear SVM per class on cached CNN features.
- Box regressor: class-specific linear regressors refine bounding boxes.
How Selective Search Works (Step-by-Step)
Step 1: Initial over-segmentation
- Split the image into many small regions (superpixels) using color/texture boundaries.
Step 2: Compute region similarities
- Score neighboring regions by hand-crafted similarity cues: color histogram, texture, size, and fill.
Step 3: Greedy merging
- Repeatedly merge the most similar neighboring region pair.
- After each merge, recompute similarities with new neighbors.
Step 4: Generate proposals at all hierarchy levels
- Each merged region defines a candidate object region.
- Convert each candidate region to a bounding box proposal.
Step 5: Remove duplicates
- Use simple deduplication and ranking to keep a manageable proposal set (around 2k).
Step 6: Hand off to CNN stage
- R-CNN crops/warps each proposal and runs a separate CNN forward pass per proposal.
Key traits
- Accurate, but extremely slow at inference.
- Multi-stage training: pretrain on ImageNet, fine-tune CNN on detection, then train SVMs + box regressors.
- Heavy disk usage to cache features for all proposals.
Fast R-CNN
Core idea
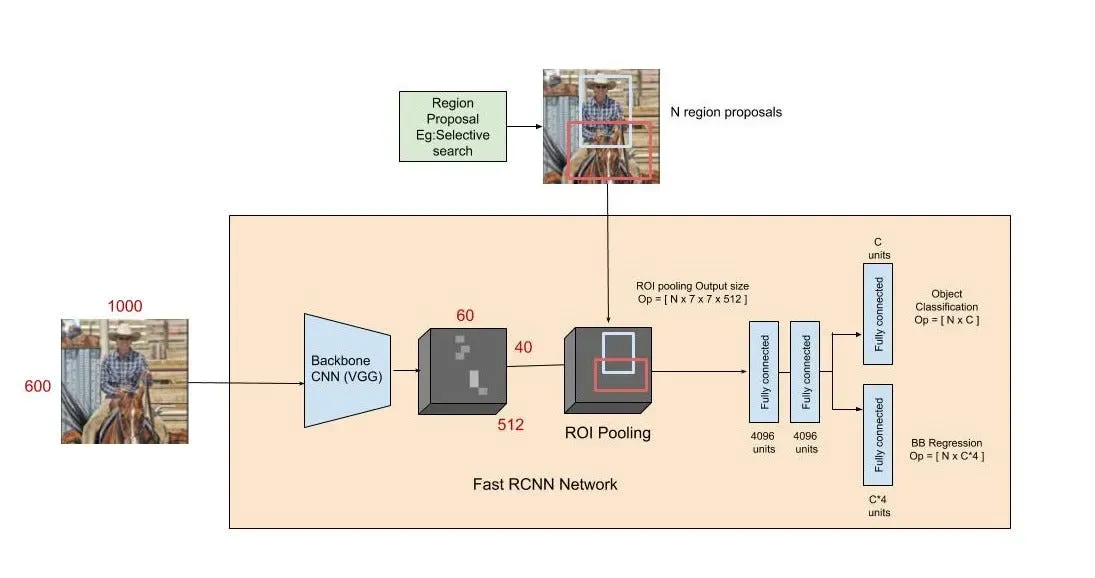
- Run the CNN once per image, then classify regions using pooled features.
- Reuse that shared feature map for all proposals instead of recomputing convolution features per region.
Pipeline
- Backbone CNN produces a shared feature map.
- ROI Pooling converts each ROI into a fixed 7x7 feature map by quantized spatial binning.
- Single head outputs class scores (softmax) + box deltas for each ROI.
Why “CNN Once Per Image” Is Better
- R-CNN bottleneck: if there are ~2k proposals, convolution is run ~2k times per image.
- Fast R-CNN change: run convolution once on the full image, then slice ROI features from the shared map.
- Computation reuse: overlapping proposals share most low/mid-level features, so repeated conv work is removed.
- Memory/I-O improvement: no need to cache per-proposal CNN features to disk.
- Training simplification: classification and box regression are learned jointly from shared features.
Key traits
- Much faster than R-CNN.
- End-to-end training with a multi-task loss (classification + smooth L1 box regression).
- Still depends on external proposals (Selective Search).
Faster R-CNN
Core idea
- Replace external proposal generation with a Region Proposal Network (RPN).
Pipeline
- Backbone CNN shared by RPN and detection head.
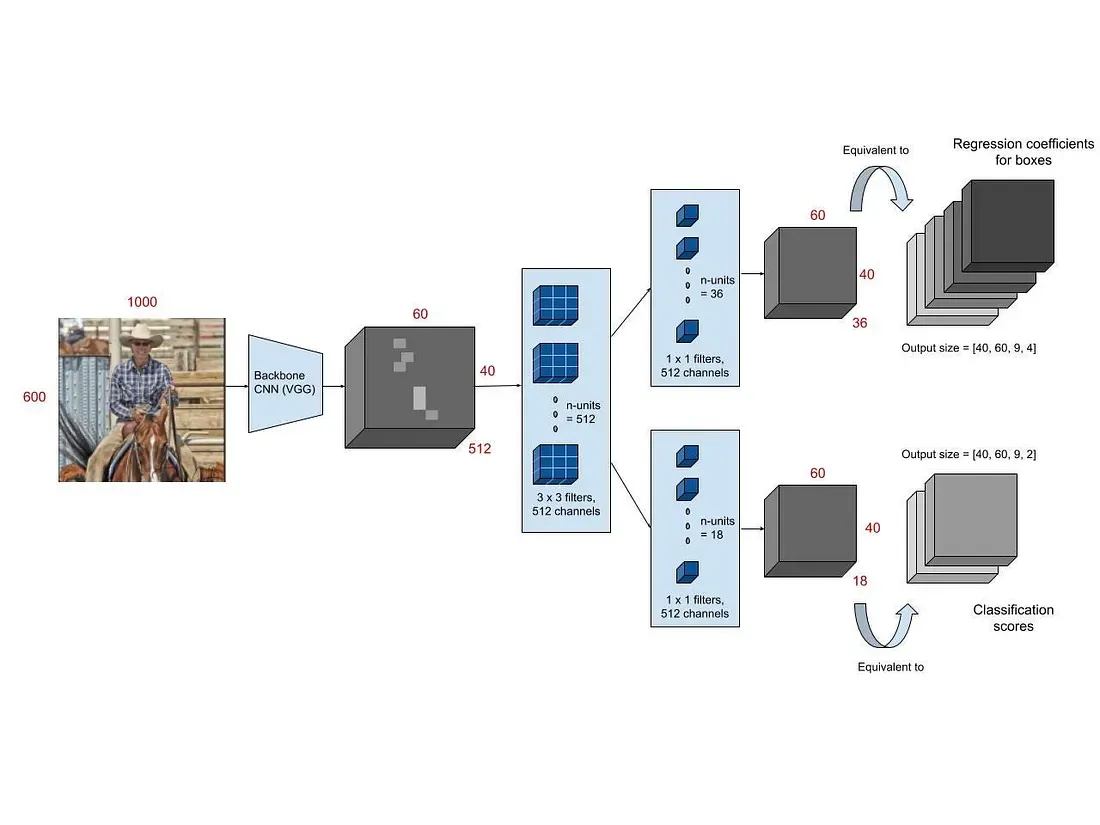
- RPN: a 3x3 conv sliding over the feature map predicts objectness + anchor box offsets.
- Anchors: multiple scales and aspect ratios per location (e.g., 3 scales x 3 ratios).
- ROI Pooling / ROI Align extracts proposal features (ROI Align removes quantization).
- Detection head predicts class + refined box.
How RPN Works (Step-by-Step)
Step 1: Shared feature extraction
- Pass image through the backbone once to get a convolutional feature map.
Step 2: Dense anchor placement
- At each spatial location, place anchor boxes with predefined scales and aspect ratios.
Step 3: Sliding prediction heads
- A small RPN head predicts for each anchor:
- Objectness score (foreground vs background),
- Box regression offsets .
Step 4: Anchor labeling (training)
- Match anchors to ground-truth boxes by IoU thresholds to mark positive/negative anchors.
- Train with combined objectness + box regression loss.
Step 5: Proposal decoding
- Convert anchor + predicted offsets into proposal boxes in image coordinates.
- Clip boxes to image boundaries and remove tiny/invalid boxes.
Step 6: Proposal filtering
- Rank proposals by objectness, apply NMS, keep top proposals (for example top 300 at inference).
Step 7: Hand-off to detector
- Send filtered proposals to ROI Pooling/ROI Align and then to the final classification/regression head.
Key traits
- Fully end-to-end and much faster than Fast R-CNN.
- Strong accuracy-speed tradeoff for general detection.
- Typical inference keeps ~300 proposals after NMS (config dependent).
Mask R-CNN
Core idea
- Extend Faster R-CNN with a parallel segmentation mask prediction branch.
Pipeline
- Backbone + FPN often used to improve multi-scale features.
- RPN generates proposals as in Faster R-CNN.
- ROI Align replaces ROI Pooling to avoid misalignment from quantization.
- Two heads: class + box regression, and a small FCN mask head that predicts a K x m x m mask per class.
Key traits
- Adds instance segmentation with minimal overhead.
- Mask loss is per-pixel sigmoid (not softmax across classes).
- Requires precise ROI alignment for good mask quality.
How They Differ
- R-CNN: per-region CNN, SVMs, slow.
- Fast R-CNN: shared CNN, ROI Pooling, still external proposals.
- Faster R-CNN: shared CNN + built-in RPN proposals.
- Mask R-CNN: Faster R-CNN + mask head with ROI Align.
Training Objectives (High Level)
- Classification loss: object class per ROI.
- Box regression loss: refine bounding box coordinates.
- RPN loss (Faster R-CNN only): objectness + anchor box offsets.
When To Use
- R-CNN: historical baseline, rarely used now.
- Fast R-CNN: useful for understanding the progression.
- Faster R-CNN: strong default for accurate detection.
Practical Notes
Use stable optimization defaults first
- Fast R-CNN and Faster R-CNN are commonly trained with SGD, momentum around 0.9, and weight decay around in classic settings.
- Start with proven optimizer settings before tuning advanced schedules.
- Monitor classification and box regression losses separately to diagnose imbalance.
Understand training strategy differences
- Early Faster R-CNN recipes often used alternating stages: train RPN, train detector, then joint fine-tuning.
- Modern implementations typically support more direct end-to-end training, but alternating training remains useful context.
- Keep proposal quality and detector quality aligned during training to avoid bottlenecks.
Prioritize compute-efficient architectures in practice
- R-CNN-style per-proposal CNN inference can require around 2k forward passes per image, which is computationally expensive.
- Fast R-CNN improves speed by sharing one feature map across proposals.
- Faster R-CNN further improves the pipeline by learning proposals with the RPN instead of external selective search.