Syllabus Map
- Study map: Syllabus Study Map
Overview
- CNNs are used for image-level prediction, region-level localization, and pixel-level labeling.
- The output granularity determines the task:
- Image classification: one label per image.
- Object detection: boxes + labels per object.
- Image segmentation: label per pixel.
Image Classification
Core Idea
- Input: full image tensor .
- Output: class probability vector of size .
- Train with cross-entropy on labeled images.
- Evaluate with top-1/top-5 accuracy and confusion matrix.
Object Detection
Core Idea
- Input: image with variable number of objects.
- Output: per detected object.
- Train with multi-part loss: classification + box regression (+ objectness).
- Evaluate with mAP at different IoU thresholds (for example, mAP@0.5 and mAP@[0.5:0.95]).
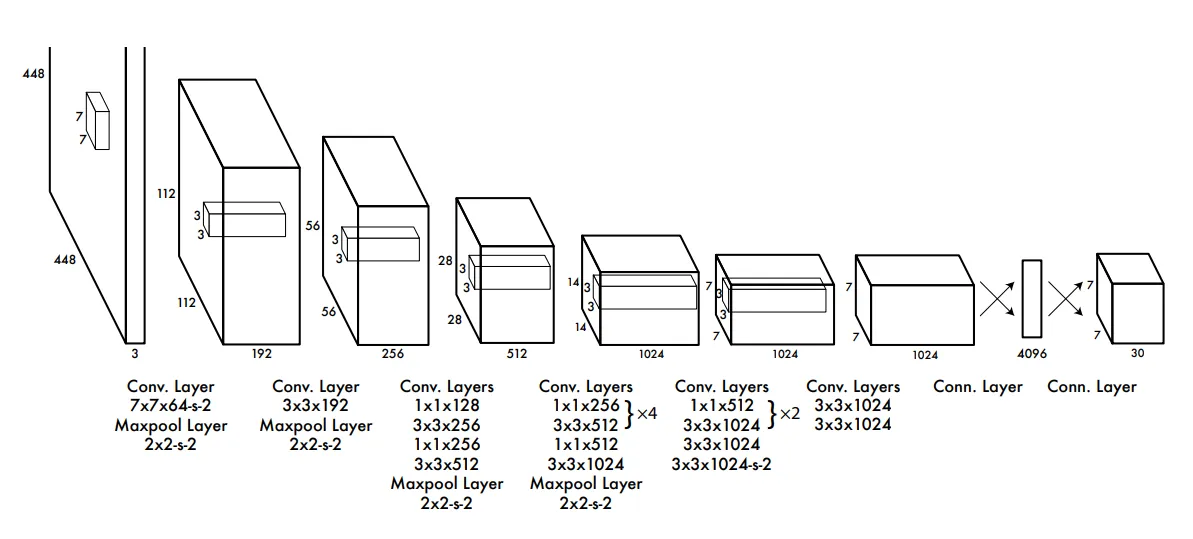
You-Only-Look-Once (YOLO)
Step 1: Prepare Labels
- Convert annotations to normalized box format .
- Ensure class IDs are contiguous and images/labels are paired correctly.
Step 2: Train Grid-Based Predictions
- Split image into feature grid cells.
- Predict objectness, class scores, and box offsets per anchor/location.
Step 3: Optimize Detection Loss
- Compute objectness loss for object/background.
- Compute class loss for positive samples.
- Compute box loss (IoU-based or L1-style, depending on YOLO version).
- A common multi-part objective is:
- Where: box/objectness/class losses are weighted by .
- Where: are matched positive anchors; higher IoU gives lower box loss.
- Binary cross-entropy over object/background labels () and objectness predictions ().
- Cross-entropy on class predictions for positive anchors only.
Step 4: Run Post-Processing
- Filter low-confidence predictions.
- Compute overlap with Intersection over Union (IoU):
- IoU ranges from 0 (no overlap) to 1 (perfect overlap).
- Apply Non-Maximum Suppression (NMS) to remove duplicate detections:
- Sort boxes by confidence score.
- Keep the highest-score box and suppress lower-score boxes that overlap it too much.
- Repeat until no candidate boxes remain.
- Keep higher-score box and suppress overlapping lower-score boxes above threshold .
Step 5: Evaluate and Deploy
- Measure mAP and latency.
- Tune confidence/NMS thresholds for task-specific precision-recall tradeoff.
Single Shot MultiBox Detector (SSD)
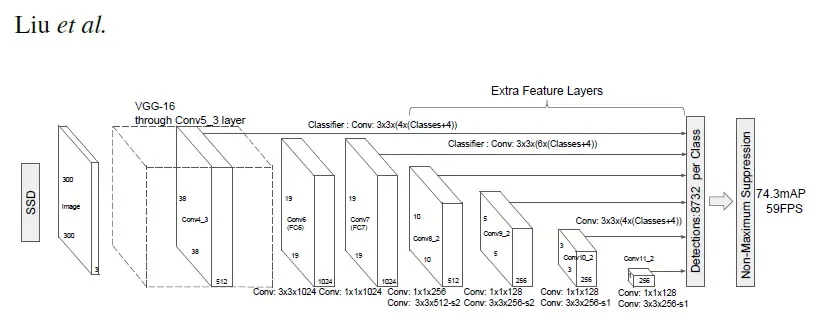
Step 1: Build Multi-Scale Feature Maps
- Extract backbone features at several spatial resolutions.
- Attach detection heads to each scale for small-to-large objects.
Step 2: Match Ground Truth to Default Boxes
- Predefine default boxes (anchors) with multiple scales/aspect ratios.
- Match anchors to ground-truth boxes using IoU rules.
Step 3: Train Classification and Localization
- Predict class logits for each anchor.
- Predict box offsets relative to matched default boxes.
- Typical SSD objective:
- Where: is number of matched positives, and balances localization vs classification.
- SmoothL1 regression over box center/size offsets for positive anchors.
Step 4: Apply Hard Negative Mining
- Keep informative negative anchors with highest classification loss.
- Balance positive and negative samples during training.
- Standard ratio target is:
- At most 3 negatives per positive anchor during hard negative mining.
Step 5: Decode and Filter Predictions
- Convert offsets back to absolute boxes.
- Apply confidence thresholding and NMS before final outputs.
Detection Transformers (DETR)
Step 1: Encode Image Features
- Run image through a CNN backbone to get feature maps.
- Flatten features and add positional encodings.
Step 2: Decode with Object Queries
- Feed learned object queries into a transformer decoder.
- Each query predicts one potential object slot.
Step 3: Hungarian Matching
- Match predictions to ground-truth objects one-to-one.
- Use matching cost from class and box terms.
- Matching is solved by:
- Matching cost combines class confidence, L1 box distance, and GIoU overlap.
Step 4: Optimize Set Prediction Loss
- Train class predictions including a “no-object” class.
- Train box regression with L1 + generalized IoU loss.
- DETR set loss:
- Set prediction loss = class loss (with no-object) + weighted L1/GIoU box losses.
Step 5: Inference without NMS
- Keep high-confidence query outputs directly.
- One-to-one matching behavior reduces duplicate detections.
Image Segmentation
Core Idea
- Input: image and dense pixel mask labels.
- Output: mask (semantic) or per-instance masks (instance segmentation).
- Train with pixel-wise losses (cross-entropy, Dice, or combined loss).
- Evaluate with IoU (Jaccard), Dice score, and pixel accuracy.
Semantic vs Instance Segmentation
Semantic Segmentation
- Assigns a class label to every pixel.
- Pixels from different objects of the same class share one label region.
- Example: all person pixels are labeled “person” without separating person A vs person B.
Instance Segmentation
- Assigns both class and instance identity to pixels.
- Different objects of the same class get separate masks.
- Example: each person in the scene gets its own mask (person 1, person 2, …).
U-Net
Step 1: Encode Context
- Downsample with convolution blocks to capture global context.
- Store intermediate feature maps for skip connections.
Step 2: Decode Spatial Detail
- Upsample progressively back to image resolution.
- Concatenate decoder features with matching encoder skip features.
Step 3: Predict Pixel Masks
- Use final convolution layer to output per-pixel class logits.
- Convert logits to masks with softmax/sigmoid.
Step 4: Train with Dense Losses
- Use cross-entropy for multi-class segmentation.
- Add Dice loss when classes are imbalanced or objects are thin/small.
- Common combined objective:
- Combined segmentation loss: pixel-wise CE + weighted Dice overlap loss.
- and are predicted and ground-truth mask values; stabilizes division.
Step 5: Post-Process Masks
- Apply thresholding for binary masks.
- Use connected components or morphology to clean noisy regions.